Autonomous Underwater Vehicles (AUVs) are increasingly used in applications such as environmental monitoring, underwater inspection, and seabed mapping. However, many existing systems are either expensive, mechanically complex, or difficult to adapt for small-scale development projects. The purpose of this project was therefore to design and develop a compact and modular AUV platform using commercially available components and open-source software.
The project focused on the integration of mechanical design, propulsion, control
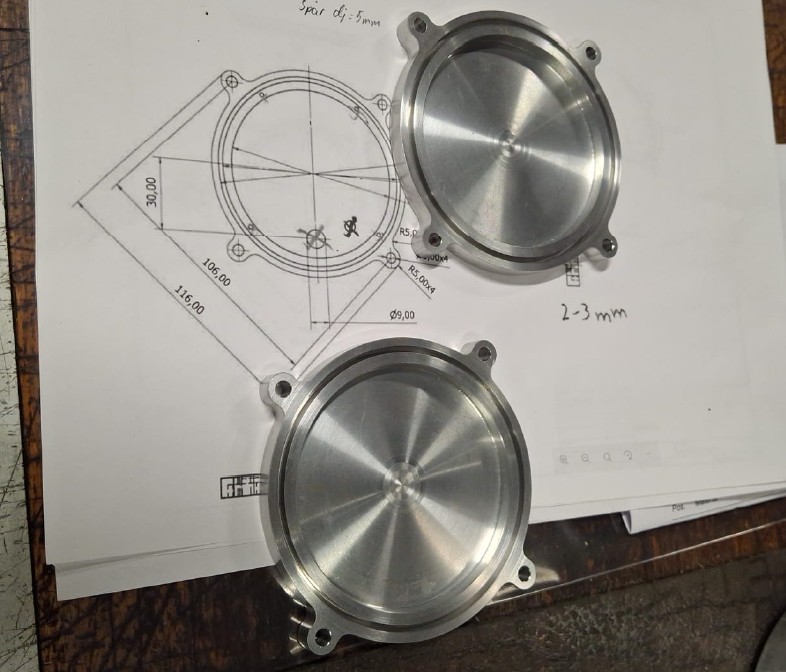
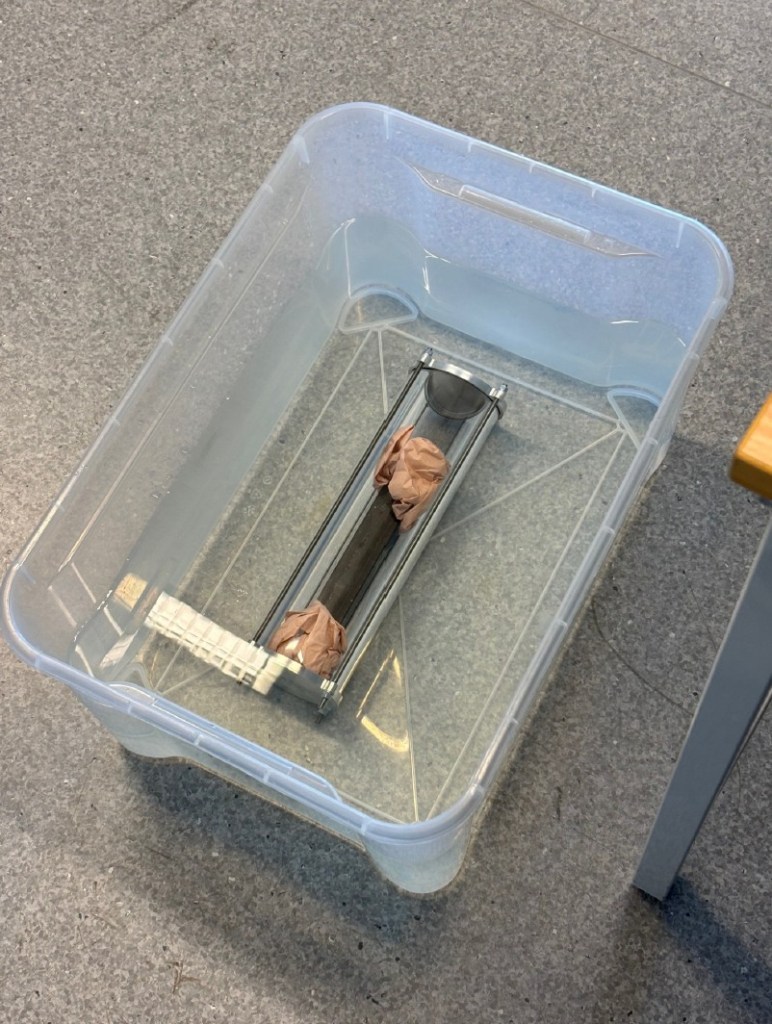
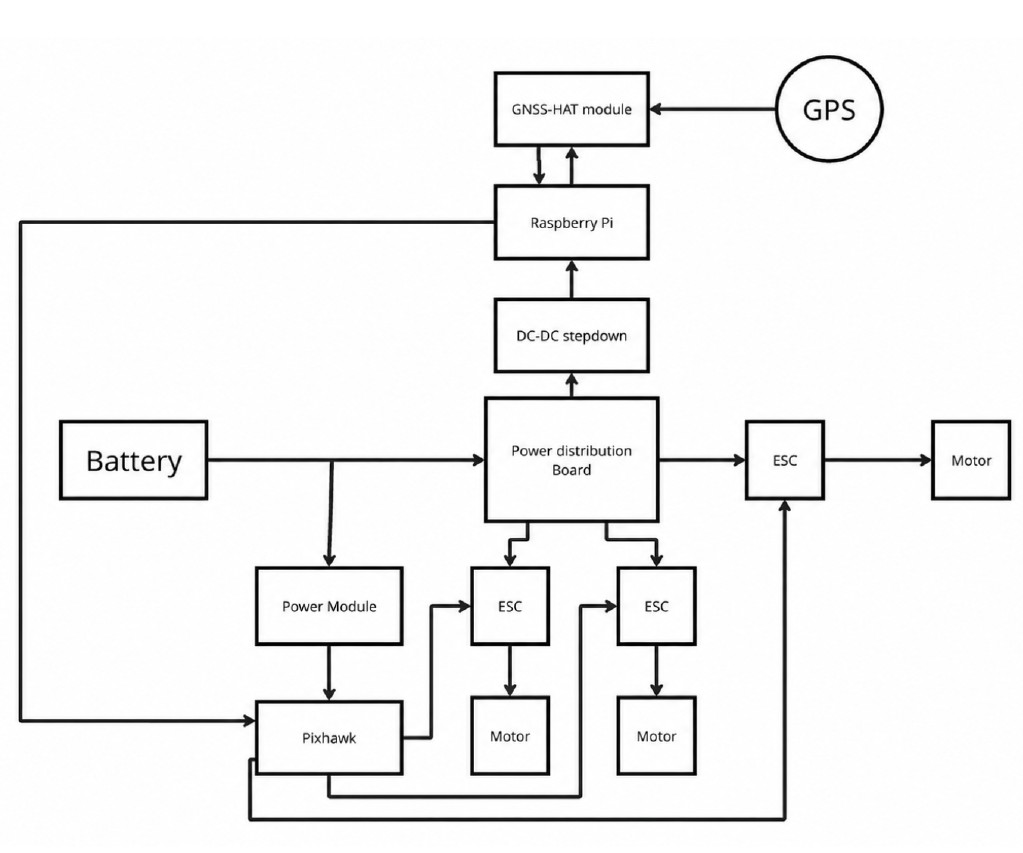
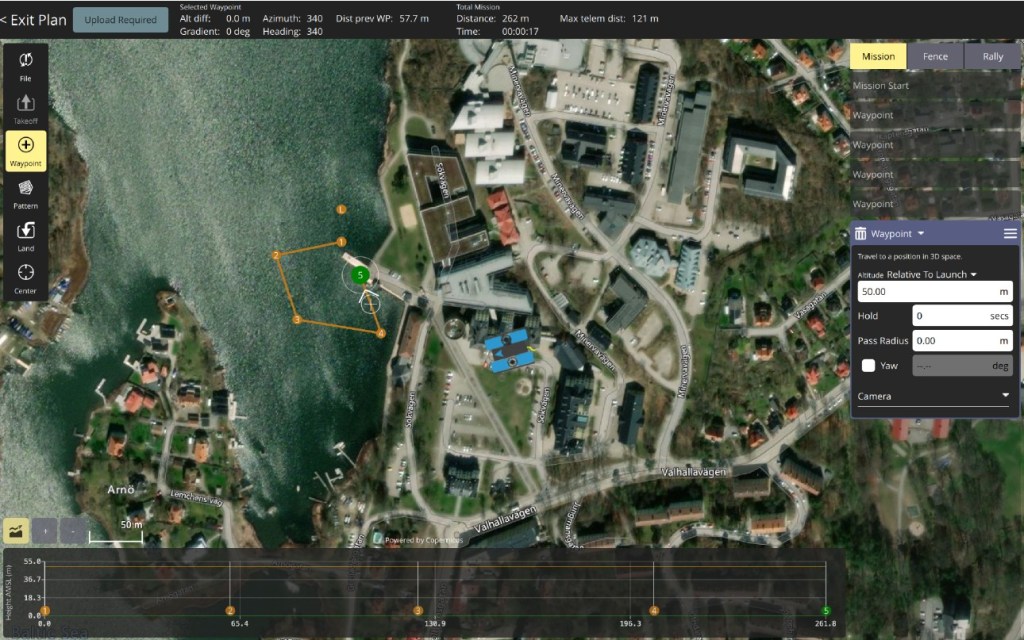
systems, navigation architecture, and waterproof structural design into a functional underwater platform. The developed system was based on a cylindrical acrylic pressure hull combined with externally mounted thrusters controlled through a Pixhawk flight controller and a Raspberry Pi 5. A waypoint-based navigation architecture using QGroundControl and a GNSS-based buoy positioning concept was also developed as part of the system design.
The implemented platform was validated through subsystem testing and integrated underwater operation. The tests verified watertight integrity, propulsion functionality, communication between the Raspberry Pi and Pixhawk, and stable manual underwater maneuvering. In addition, simplified autonomous control sequences and mission-planning functionality were successfully demonstrated. However, fully autonomous underwater waypoint navigation could not be completely validated due to limitations related to communication, sensor integration, and project timeframe.
The project demonstrates that a modular low-cost AUV platform can be developed using commercially available hardware and open-source software while still providing a flexible foundation for future autonomous functionality and sensor integration. The results further highlight the multidisciplinary challenges associated with underwater system integration, particularly regarding waterproofing, localization, communication, and autonomous control.
By:
Victor Pettersson & Peter Wadmark