
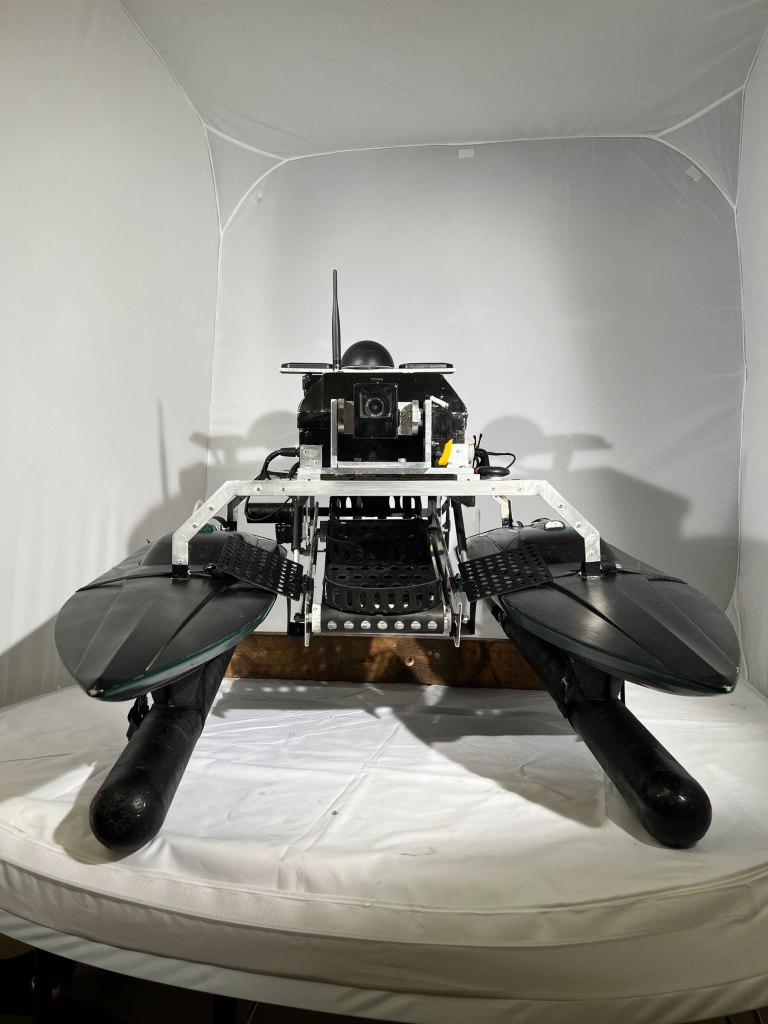
The project was based on building upon the Stingray catamaran, which was developed in the 2022 edition of the corresponding course in Marine Engineering at Blekinge Institute of Technology. Stingray provided a basic structure and design that the project could build upon. The purpose of the project was to equip Stingray to be able to pick up tennis balls from the water, either fully or partially autonomously.
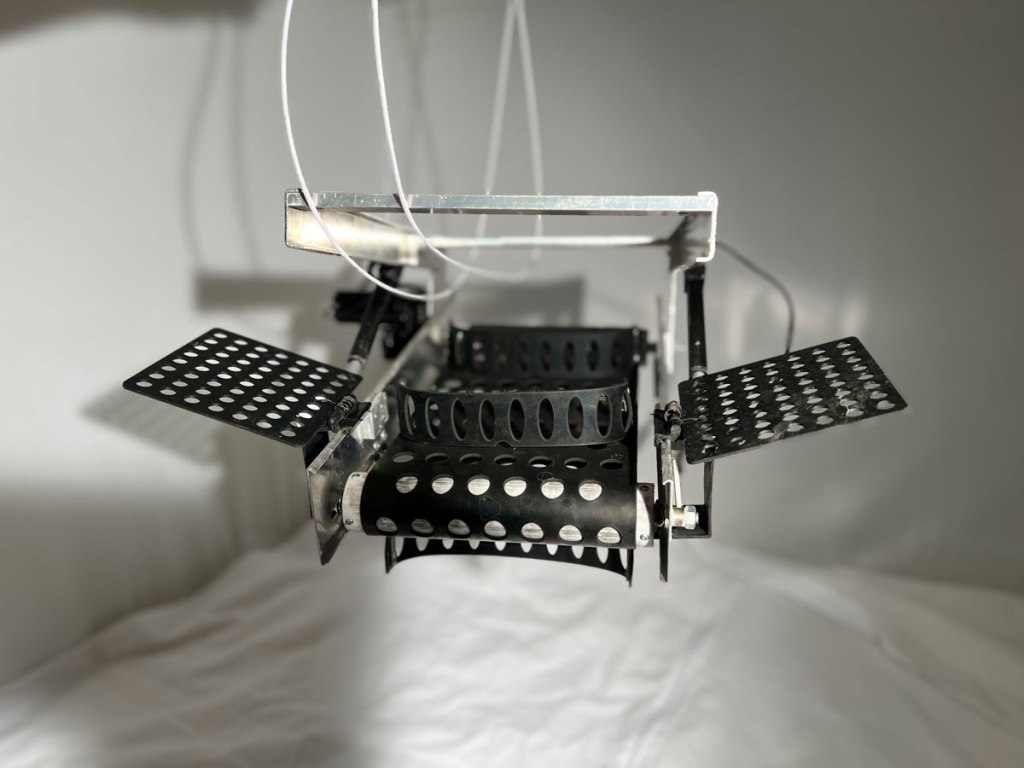
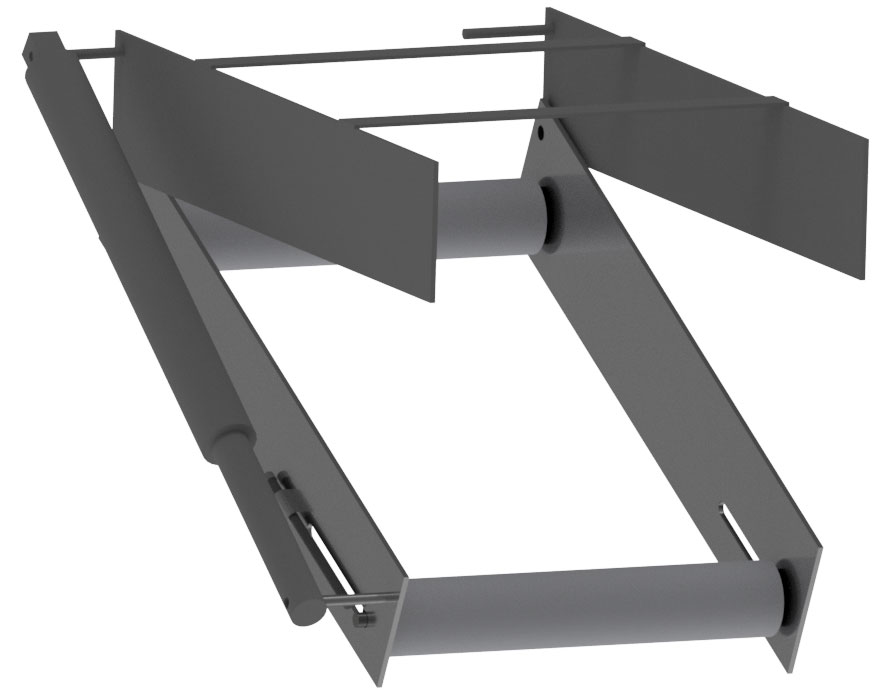
The method used during the project was the Design-Build-Test-Learn cycle, where each iteration was conducted with the aim of achieving an improved solution. The final retrieval mechanism consisted of a retractable conveyor belt, which was mounted between Stingray’s hulls. The conveyor belt was made of aluminum, and the retracting mechanism was operated by two actuators controlled by a motor control unit and a microcontroller.
To store the retrieved tennis balls on Stingray, a container was created and attached behind the conveyor belt. The container was designed to hold approximately 10 tennis balls. The newly manufactured components, the conveyor belt and the container, added weight, which was compensated for by buoyancy elements consisting of two PVC pipes filled with foam sealant.
The project team successfully achieved the goal of partially autonomously retrieving tennis balls from the water. The result was a retrieval module for Stingray, described above, which can be easily mounted on and off. This report includes a description of the project team’s work and discussions regarding material selection, component selection, and various concepts, as well as possibilities for improvement. Stingray, along with its associated components, also participated in the WARA – PS fair, whose purpose is to promote research, development, and application of artificial intelligence within public safety.
Kasper Jansson, Ida Kjellsson, Dong Jiang and Samuel Nyberg



Cooperation with

