The Marlin project aims to develop an underwater vehicle, short UV, that is intended to serve as a platform for future projects where students can further develop and add features.
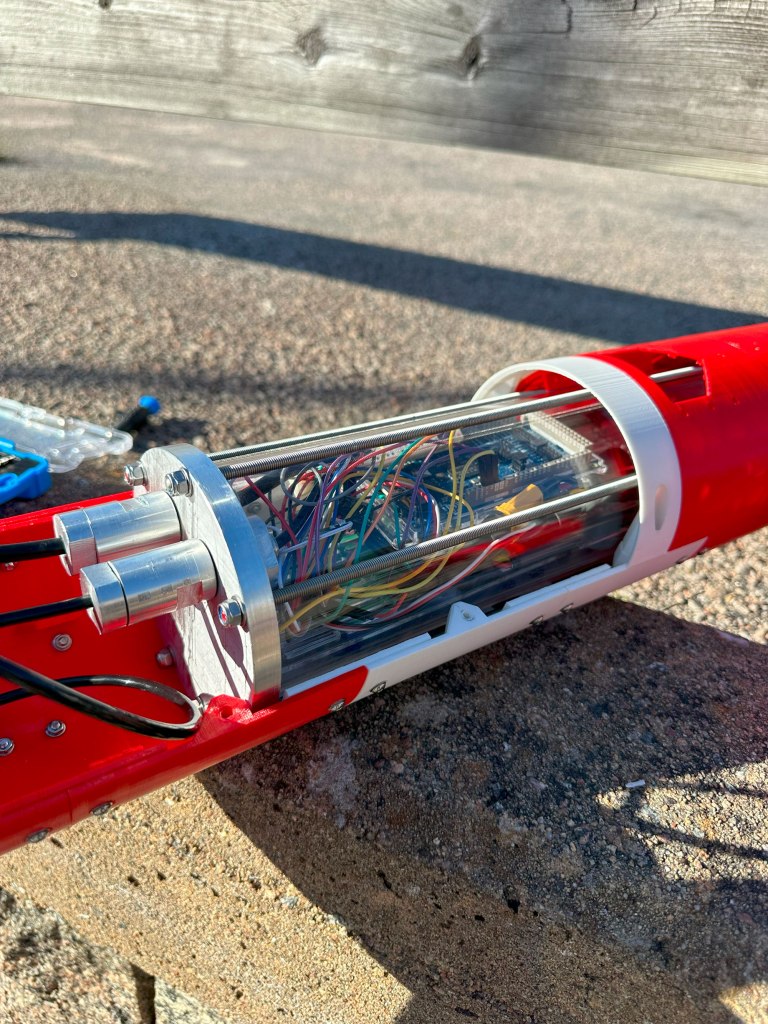
The modular hull design from Amethyst gives a solid foundation for the development of The Marlin. A key component of the UV is its watertight electronics tube, which serves as a container for all sensitive electronic components. Watertight cable penetrations, components for propulsion, control, and measurement equipment are connected to the processor unit and power supply inside the tube. Because proper orientation of The Marlin is crucial for control, an algorithm is developed to be implemented in the processor unit to keep the vehicle horizontal underwater.
The result is a platform with a watertight electronics tube, necessary propulsion components, and an algorithm that maintains The Marlin’s level underwater. This design provides a robust foundation for students to further develop and customize the vehicle for various educational and research applications.
Ninni Hammarström, Dong Jiang, Ida Kjellsson and Hannes Wolf